
 English
English


Internet of Things “RECS 101 a Micro Web Embedded Server for Motion Control”
Poiché il World Wide Web (o Web) è in continua evoluzione, appare chiaro che tale tecnologia assume delle nuove funzionalità che vanno oltre la semplice visualizzazione delle pagine Web, questo perché i moderni browser sono capaci di fornire interfacce GUI a varie applicazioni client/server senza il bisogno di andare a implementare del software per il lato client. La gestione di apparati elettronici e meccanici tramite interfaccia Web fornisce all’utente l’abilità di configurare e monitorare variegati dispositivi tramite Internet mediante l’uso di un comune browser. La soluzione migliore a questo tipo di esigenze è sicuramente data dall’utilizzo di server web embedded connessi a un’infrastruttura di rete che fornisce un’interfaccia utente basata sull’ormai noto linguaggio HTML.
Recs Internet
Se si pensa di aggiungere alle funzionalità ormai consolidate di un web server embedded la capacità di poter gestire applicazioni Java si aprono le frontiere ad applicazioni che li rendono capaci di eseguire i più variegati compiti quali, ad esempio, quelli di controllo remoto, supervisione e gestione di sistemi meccanici per il controllo del movimento (figura 1).
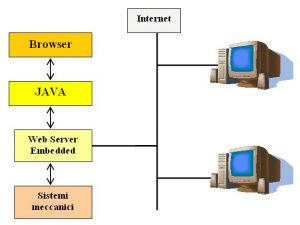
Fig. 1 – Architettura di un web server embedded
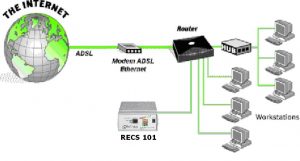
Intellisystem Technologies ha implementato tale tecnologia all’ interno di un dispositivo denominato RECS 101 (acronimo di Remote Ethernet Control System) che permette la realizzazione di procedure tipiche dei sistemi di controllo quali, ad esempio: acquisizione di segnali, azioni di controllo per mezzo di attuatori, l’elaborazione e la presentazione delle informazioni acquisite o manipolate. Il sistema embedded presentato può far eseguire dei task pre-programmati all’ interno della propria ROM o far eseguire delle applicazioni esterne scritte in lava. RECS 101 effettua il controllo delle sue due porte digitali a 16 bit (rispettivamente una di input e una di output) mediante un’interfaccia basata sui socket di Internet (figura 2).

Fig. 2 – Gestione delle porte di I/O mediante socket
Per fare ciò è necessario che l’interfaccia che gestisce i socket venga implementata nel PC utente che intende collegarsi a RECS 101 attraverso il protocollo TCP/IP. Una delle peculiarità di RECS 101 consiste nel fatto che tale interfaccia può essere implementata indifferentemente mediante un Applet lava (figura 3) o un ‘applicazione C/lava che utilizzi i socket di Internet (figura 4).
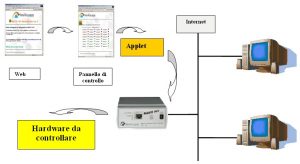
Fig. 3 – Implementazione mediante Applet Java
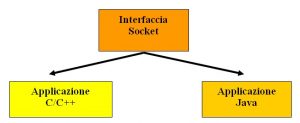
Fig. 4 – Interfacce Socket gestibili da RECS 101
Tali interfacce si occuperanno quindi di inviare e ricevere i comandi per il controllo di I/O attraverso l’indirizzo IP impostato su RECS 101 e la relativa porta fissata alla 6001. RECS 101 si occuperà dell’interpretazione dei comandi di controllo ricevuti o trasmessi dal dispositivo elettronico da controllare a esso connesso. I comandi di controllo si suddividono in due categorie che identificano due operazioni diverse: monitor stato I/O e controllo dell ‘output. Fig. 6 – Comandi per il controllo dell’Output Tramite Monitor Stato I/O è possibile avere informazioni inerenti lo stato di tutte le linee di I/O contenute nelle due porte a 16 bit di RECS I O 1. I comandi relativi a questa operazione sono essenzialmente due (figura 5):
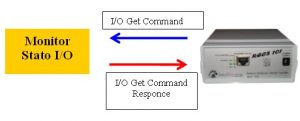
Fig. 5 – Comandi per il Monitor di Stato I/O
I/O Get Command, il comando mediante il quale l’interfaccia socket interroga RECS 101 sullo stato delle proprie porte; I/O Get Command Responce, il comando di risposta mediante il quale RECS 101 comunica all’ interfaccia socket lo stato delle sue porte di I/O. La seconda operazione, Controllo dell’Output, gestita unicamente dal comando Output Set Command è utilizzata dall’interfaccia socket per settare i valori della porta d’Output di RECS 101 (figura 6).
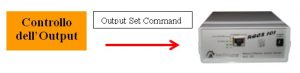
Fig. 6 – Comandi per il controllo dell’Output
RECS 101 opportunamente integrato ad altri sistemi rappresenta un valido strumento che sfruttando le moderne tecnologie di telecontrollo remoto offre soluzioni sicure e professionali nettamente superiore alle soluzioni analogiche utilizzate da diversi anni nel mercato. Sfruttando ad esempio la combinazione vincente del micro embedded web server RECS 101 con una network camera AXIS 2100, è possibile avere a disposizione una postazione di telecontrollo remoto capace di gestire non solo immagini ma anche capace di controllare dispositivi per il controllo del movimento. Più in dettaglio verrà di seguito descritta un’applicazione reale che permette il controllo remoto di posizione con precisione micrometrica lungo i tre assi cartesiani. Il sistema si compone di un sistema meccanico di precisione che può essere utilizzato all’interno di sistemi e macchinari per la produzione che necessitano il posizionamento di oggetti e/o utensili.
Applicazioni
In figura 7 si riporta uno schema del sistema che consiste di una consolle di comando rappresentata da una workstation connessa alla rete Internet, una network camera AXIS e RECS 101 opportunamente interfacciato tramite le sue porte al sistema di controllo locale dei motori dell’apparato di posizionamento.
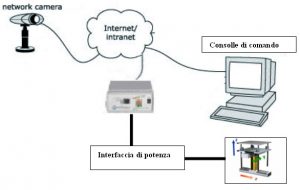
Fig. 7 – Schema del sistema di controllo di posizione
Tale sistema permette la movimentazione da remoto dell’apparato meccanico mediante un ‘ interazione basata su grafica vettoriale sviluppata in Java che ricostruisce virtualmente gli spostamenti del sistema (figura 8).
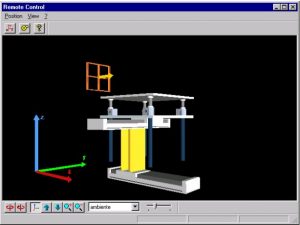
Fig. 8 – Interfaccia Grafica Utente sviluppata in Java
La figura 9 mostra il modello 3D del sistema di posizionamento costituito da tre guide lineari, ciascuna dotata di vite a ricircolo di sfere, disposte nelle tre direzioni cartesiane; di esse, due sono del tipo a barra e sono disposte rispettivamente secondo le direzioni orizzontali x e y, mentre il movimento nella direzione verticale z è realizzato mediante una pedana sostenuta da quattro guide, anch’esse a vite.
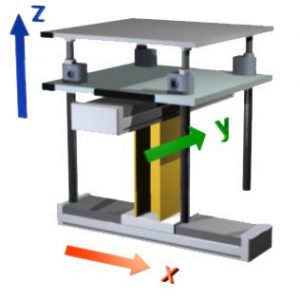
Fig. 9 – Modello 3D del sistema meccanico di posizionamento
Ogni guida è azionata da un motore elettrico di tipo brushless, dotato di encoder a impulsi in quadratura e di riduttore di giri; infine alle estremità di ogni guida sono presenti degli opportuni finecorsa per il rilevamento della corsa massima. L’apparato di movimentazione è corredato da un sistema di controllo dedicato costituito da un backplane sul quale sono montate 3 schede di controllo, ciascuna utilizzante un chip specializzato (HP HCTL-1100) per il controllo di motori elettrici in continua di tipo brushless o passo passo (figura 10).
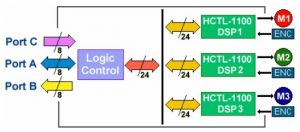
Fig. 10 – Sistema di controllo dedicato per la movimentazione
La logica d’ interfaccia del backplane fornisce 3 porte a 8 bit, di cui la porta A, bidirezionale, è quella dedicata allo scambio dei dati da e verso i registri dei chip di controllo, la porta B, di input, viene utilizzata per la lettura dei fine corsa ed infine la porta C, di output, serve all’indirizzamento dei chip e per la generazione dei segnali di sincronismo. La soluzione presentata permette di ridurre drasticamente i costi di gestione del sistema e al tempo stesso permette il suo controllo remoto tramite Internet riducendo in questo modo eventuali costi dovuti a interventi esterni.
A cura di Cristian Randieri. Articolo pubblicato sulla rivista Automazione Oggi N. 266 – Febbraio 2004.
Per scaricare l’articolo pubblicato sulla rivista, seguire il link riportato di seguito http://www.intellisystem.it/portfolio/ao-feb-04-recs-101/


 RSS - Articoli
RSS - Articoli
You must belogged in to post a comment.